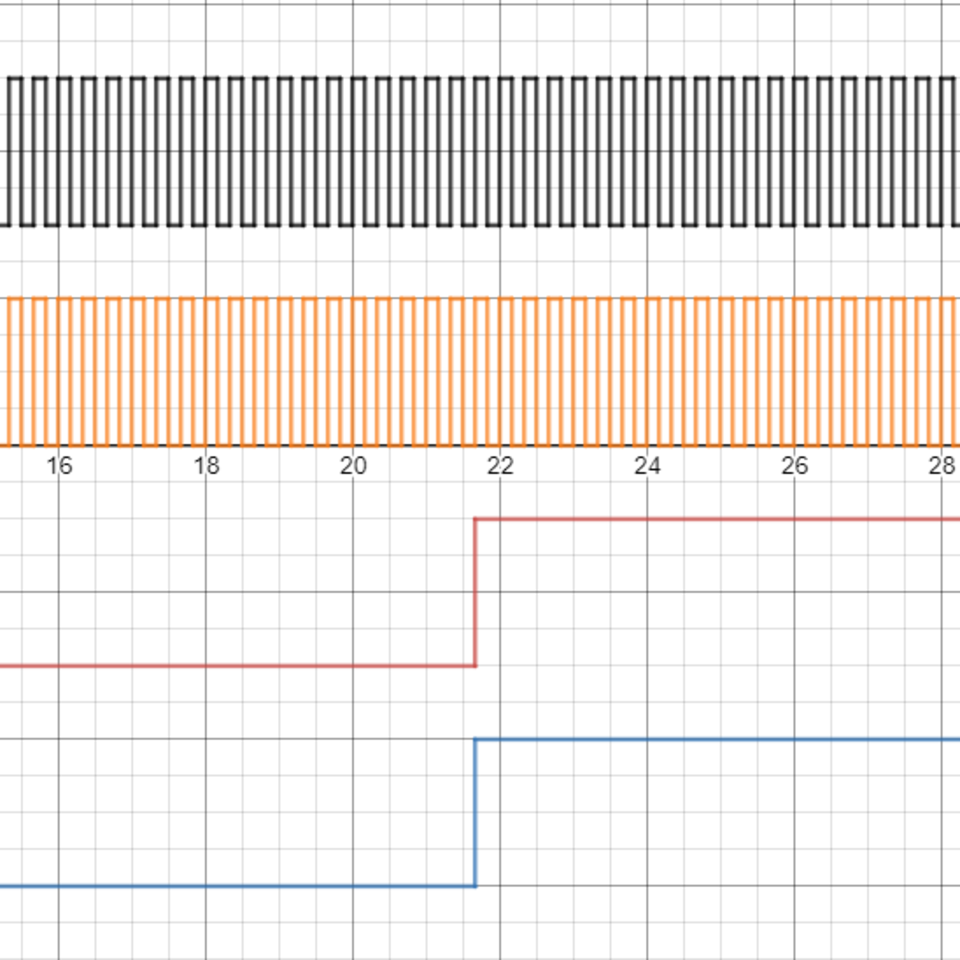
Digital Phase Meter Design
Frequency Electronics is a public company that provides high precision time and frequency products for commercial and military suppliers. They […]

Drone Research
Researching drone real time object detection.
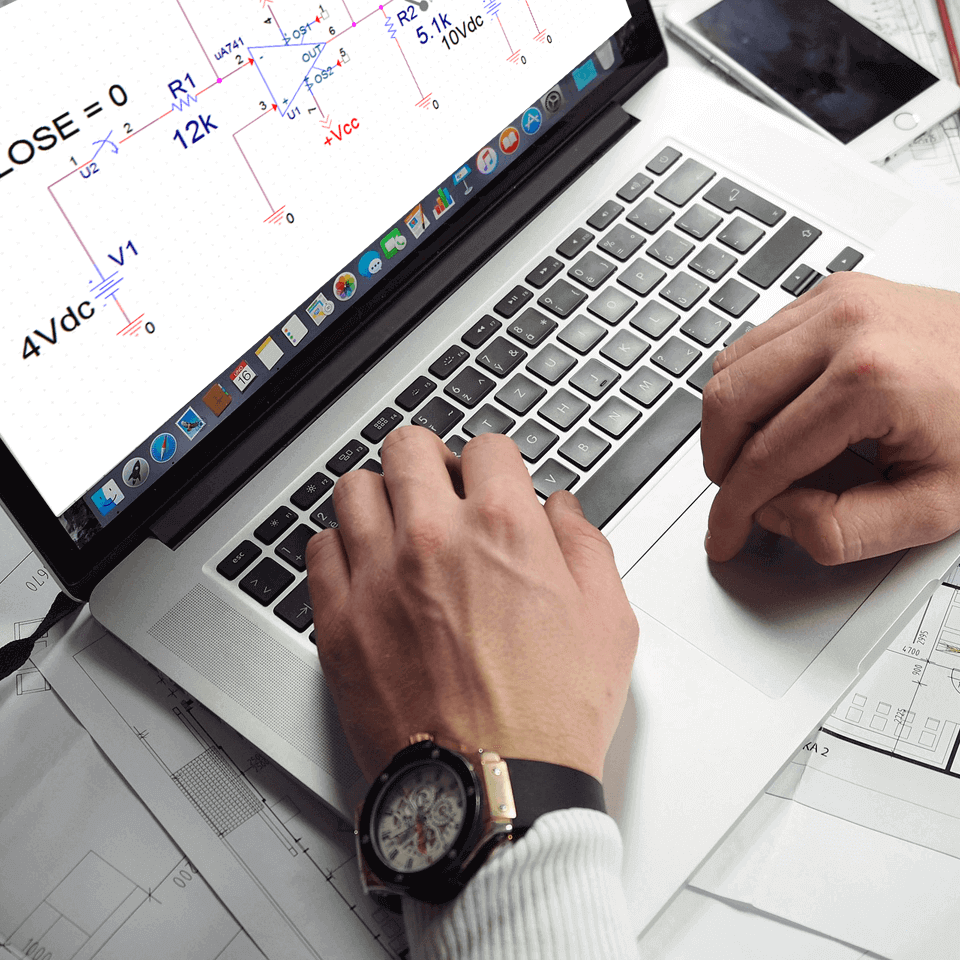
Operational Amplifier Circuit
A simple project in PSpice to determine the time till the output voltage of an Op Amp reaches saturation.
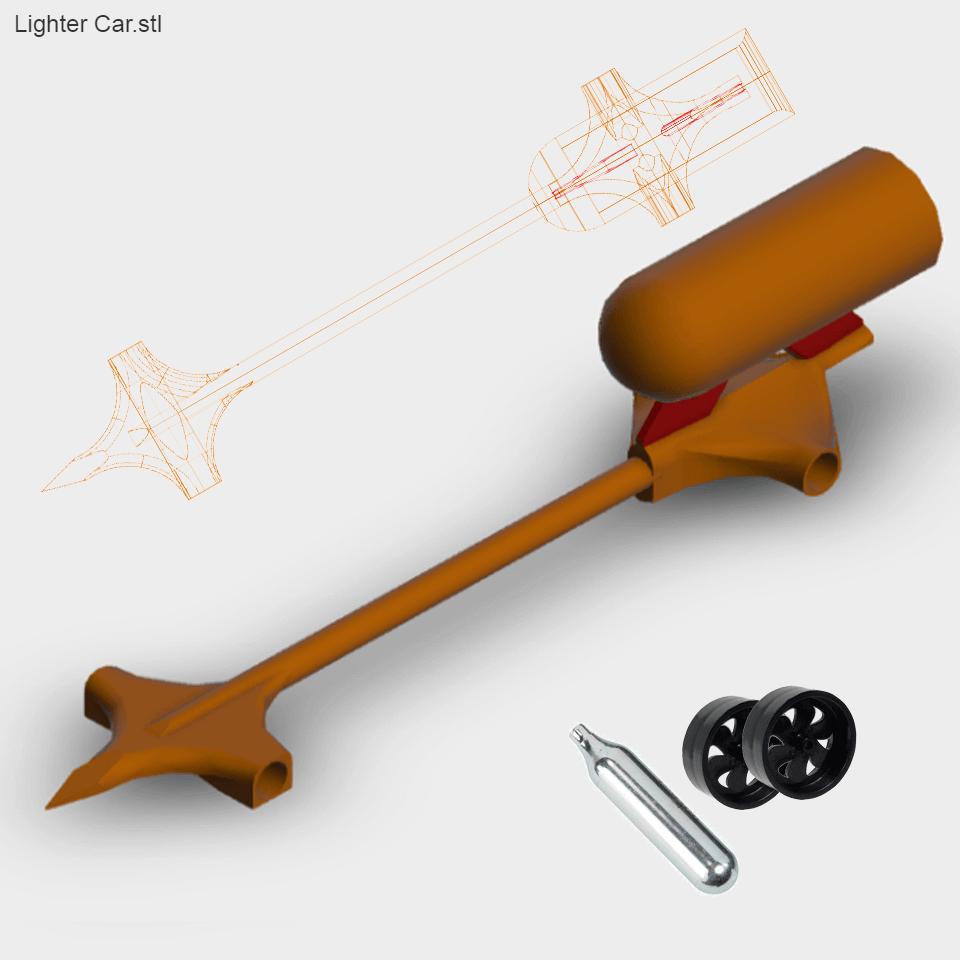
CO2 Dragster
This is a CO2 Dragster that I designed, 3D printed, and raced. It is a sleek yet sturdy design with minimal drag. It has a long neck to prevent the front half from popping up and rubbing across the wire track. To minimize the friction between the axle and its wood casing.
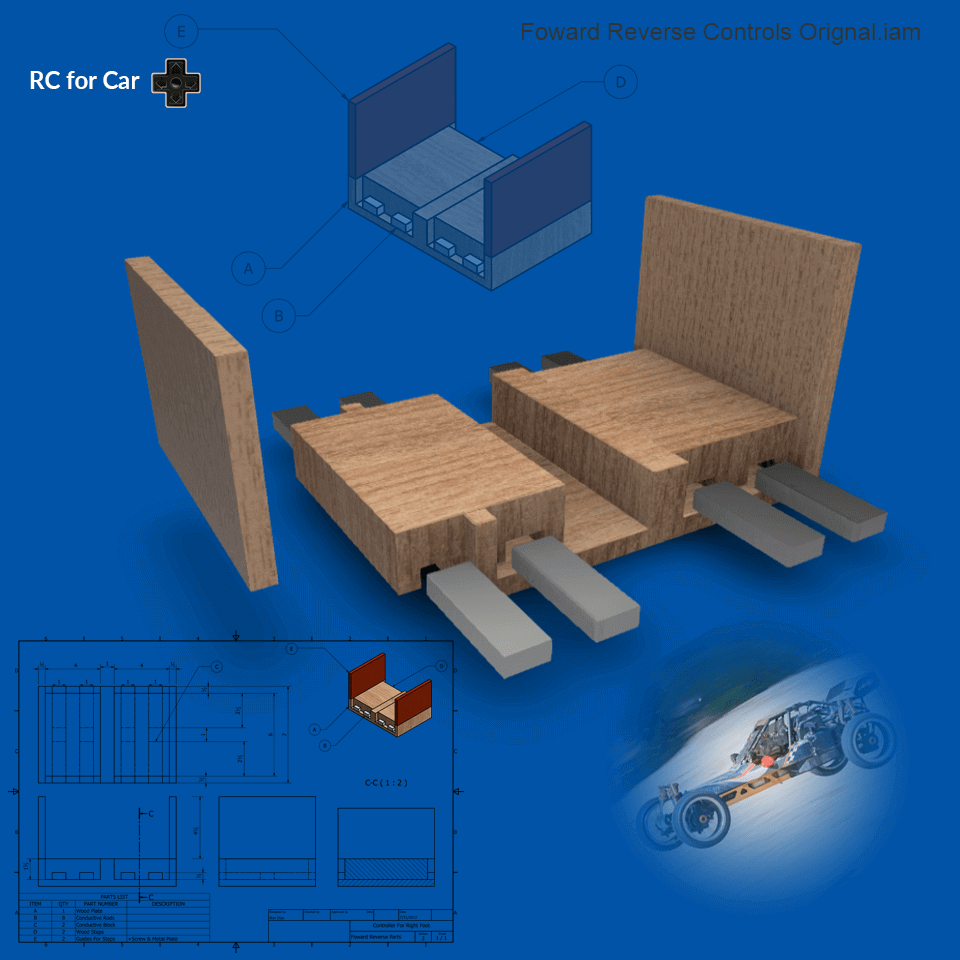
RC Car for Disabled
The goal was to create ergonomic controllers for a person with no arms and no right foot. This project was our final grade for Farmingdale State College level principal of engineering. I designed, assembled, and tested a remote controller for a hypothetical handicap person to drive a RC Car. The special controllers were tested for ergonomics and efficiency where it received a score of 8 out of 10.